Ciao a tutti.
Dopo un periodo di test sulla mia nuova nuova 3Drag, e un milione di ore in compagnia di San Google
ho deciso di fare un cero numero di migliorie, per renderla più adeguata alle mie richieste.
In questo post inizio ad elencare le migliorie che intendo fare (o ho già fatto)
Seguiranno altri post con l'avanzamento lavori.
Attendo anche commenti e consigli da chiunque.
AGGIORNAMENTO - 12 agosto 2015
Dopo un po di prove e lavori ho deciso che, per quello che voglio io,
e cioè altissima precisione, la struttura della 3DRag è carente di principio.
Per cui ho deciso di costruirne una mia, vagamente ispirata alla Ultimaker 2
(pare sia la migliore sul mercato non pro),
Ovvero con movimenti X-Y in testa (magari CoreXY) e piatto discendente, volume 400x400x400.
e destinare gli ultimi acquisti (Viti trapezoidali, motori 400 passi etc)
alla nuova macchina,
di questa, però scriverò in un prossimo post, dopo aver abbozzato bene il progetto.
Sulla 3dRag voglio solo modificare almeno 1 asse (portarla a 200x400) ed usarla
per FilaFlex e cioccolato
Road Map:
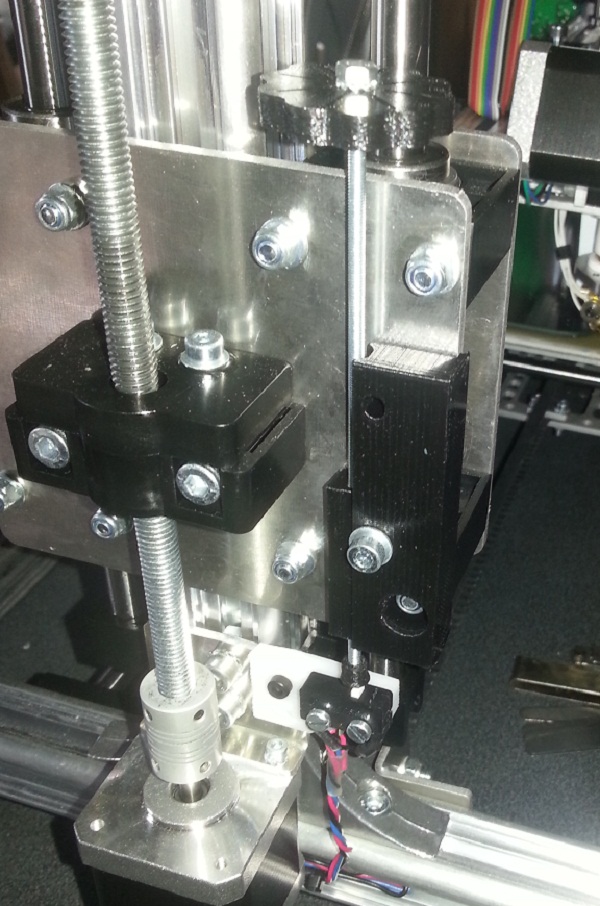
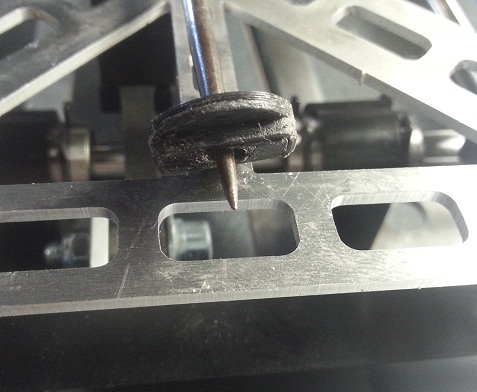
1) Sostituzione finecorsa asse Z (Fatto)
L'attuale sistema è veramente inaffidabile.
Ho stampato questi oggetti http://www.thingiverse.com/thing:317411, poi ho sostituito la vite con una barretta
filettata M3 x 120mm, su cui ho avvitato un piccolo tallone ed una rotella godonata con marker ogni 0.0625 e 0.05 mm
http://www.robot-eyes.com/public/3Drag/1A.jpg
2) Srotolatori su cuscinetti con attacco rapido (Fatto)
anche questi trovati su Thngiverse, ma i coni da un progetto ed il fastlock da un'altro. Solo che non ho segnato i link
su richiesta posso condividere gli STL, ma non sono miei.
http://www.robot-eyes.com/public/3Drag/2A.jpg
3) Illuminazione con strip LED
4) Sostituzione cinghie assi X e Y con GT2 e pignone 16 denti.
Ho ordinato il materiale e lo sto aspettando.
Secondo la formula (step * passi) / (passo cinghia * denti) dovrei arrivare a 100 passi/mm (contro i 64)
Ho pensato anche alla possibilità di sostituire le cinghie con viti e chiocciole a ricircolo di sfere, ma......
anche comprandole professionalmente sono sempre centinaia di euro, più il lavoraccio di progettazione.
Lascio l'idea per quando progetterò la mia 3dCarlo.....
5) Sostituzione dei drivers A4988 con DRV8825 (Fatto)
Ho ordinato il materiale e lo sto aspettando.
usando step da 1/32 anzichè 1/16 raddopia la risoluzione (teorica)
Da quel che so degli stepper, però, un motore non si fermerà mai in frazione di passo superiore a 1/2
però la fluidità del movimento dovrebbe migliorare molto...
Prima : http://www.robot-eyes.com/public/3Drag/0A.jpg
Dopo : http://www.robot-eyes.com/public/3Drag/5A.jpg
6) Sostituzione piatto riscaldante:
Pensavo di utilizzare un cristallo 4/5 mm con un piatto MK2A incollato sotto .
Con l'occasione vorrei montare su molle il piatto, per evitare che un'errore in Z
mi distrugga il cristallo. (L'idea è molto simile a quella di Mikeb69)
Contemporaneamente sostituirò l'alimentatore 12V con uno da antifurto con batteria tampone.
Mentre il piatto sarà alimentato a 24V con un ripetitore MosFet (Non mi fido a usare quello sulla mainboard)
MK2A, ed alimentatori li ho, manca il cristallo ed i disaccoppiatori.
[Idea in secondo piano]
6A) Miglioramento allineamento piatto: (aggiunta 20/5/2015) (Fatto)
Strada facendo ho deciso di migliorare il sistema di allineamento del piatto, invece
di inserire solo le molle.
L'allineamento è ora fatto su tre punti.
Vedi descrizione nel post del 21/5
6b) Sostituzione Hot End(aggiunta 1/6/2015) (Fatto)
Dati i problemi dell'Hot End originale, l'ho sostituito con quello di IeC.
7a) Inscatolare tutta l'elettronica.
7b) Cambiare i cablaggi inguainandoli in cavo-catena e connettorare tutto
8) Miglioramento asse Z (Fatto)
Sostituzione della barra filettata M8 con altra estrusa in INOX e rettificata,
bloccaggio con cuscinetto anche in basso
In seguito verificherò l'opzione di passare alla barra TR10X2 o TR 8X1.5 (quasi introvabile) [Idea abbandonata]
9) sostituzione del motore Z con altro (sempre NEMA 17) da 0,9° o 400 passi.
In questo caso la risoluzione Z raddoppia davvero.
In seguito valuterò se sostituire anche gli altri.
(costano 25-30$ l'uno, e l'asse Z per ora è il mio tallone d'Achille)
[Idea abbandonata]
Opzioni future,,,,, Ancora nebulose.
10) Guida asse Z dai due lati.
Al momento penso di guidare l'asse di destra con cinghia e pulegge.
11) Camera (in lexan ?) con chiusura totale della macchina. [Idea abbandonata]
12) Doppio estrusore [Idea abbandonata]
Penso di sostituire la mainboard con Arduino mega (ne ho parecchie) e RAMPS
così non impazzisco in sdoppiatori di segnale etc
Gli hot end saranno Jhead (mi piacciono perché piccoli) o E3Dv6 (simili)
I drive..... ancora non so se tipo Wade (come l'attuale) o a vite (tipo IeC)
12) Estrusore di pasta (cioccolata, pasta di mandorle etc) per dolci Hi-Tec
------------------------------------------------------------------------------
Per ora chiudo lo sproloquio (ebbene sì, sono logorroico).
A presto con i risultati dei lavori.
Carlo.
Come ti trasformo la 3Drag
-
RobotEyes

- Messaggi: 77
- Iscritto il: 20/04/2015, 18:39
- Occupazione: Condulente Informatico
- Home_Page: http://
- Prov.: TO
- Contatta:
Come ti trasformo la 3Drag
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ultima modifica di RobotEyes il 14/08/2015, 16:02, modificato 9 volte in totale.
-
federico.balugani
- Messaggi: 73
- Iscritto il: 12/03/2015, 14:53
- Occupazione: Ricercatore
- Home_Page: http://
Re: Come ti trasformo la 3Drag
Ciao!
complimenti per la lista delle modifiche! Immagino le farai passo per passo... tienici aggiornati, cosi potremo capire quali fra queste ti sono sembrate più rilevanti nell'ottenimento di stampe di qualità migliore
complimenti per la lista delle modifiche! Immagino le farai passo per passo... tienici aggiornati, cosi potremo capire quali fra queste ti sono sembrate più rilevanti nell'ottenimento di stampe di qualità migliore
Re: Come ti trasformo la 3Drag
Una bella lista!!!!
Per la chiusura hai visto come ho fatto la mia
http://www.thingiverse.com/thing:768612
Per la chiusura hai visto come ho fatto la mia
http://www.thingiverse.com/thing:768612
-
Prax
- Messaggi: 45
- Iscritto il: 03/12/2014, 13:26
- Cod. abbonamento Elettronica In: 9834B
- Home_Page: http://
Re: Come ti trasformo la 3Drag
Riguardo alla sostituzione delle cinghie con le GT2 :
Avevo pensato pure io alle puleggie da 16 denti (come sulle Ultimaker) al posto di quelle standard da 20 denti, ci sarebbe un vantaggio di un ulteriore 25% circa rispetto all'uso di quelle da 20 denti.
Però le puleggie da 16 denti sono più piccole e di conseguenza le cinghie X e Y che si incrociano sotto al carrello si avvicinerebbero troppo tra loro o addirittura potrebbero toccarsi.
Così per ora ho scartato l'ipotesi di usare quelle da 16.
Spero di sbagliarmi, o magari ci sia una facile soluzione per ovviare al possibile problema.
Facci sapere se riesci a montarle senza problemi!
Un'altra cosa, le puleggie da 16 denti sono più delicate, occhio a non sforzare troppo altrimenti potrebbero deformarsi.
Buon lavoro!
Avevo pensato pure io alle puleggie da 16 denti (come sulle Ultimaker) al posto di quelle standard da 20 denti, ci sarebbe un vantaggio di un ulteriore 25% circa rispetto all'uso di quelle da 20 denti.
Però le puleggie da 16 denti sono più piccole e di conseguenza le cinghie X e Y che si incrociano sotto al carrello si avvicinerebbero troppo tra loro o addirittura potrebbero toccarsi.
Così per ora ho scartato l'ipotesi di usare quelle da 16.
Spero di sbagliarmi, o magari ci sia una facile soluzione per ovviare al possibile problema.
Facci sapere se riesci a montarle senza problemi!
Un'altra cosa, le puleggie da 16 denti sono più delicate, occhio a non sforzare troppo altrimenti potrebbero deformarsi.
Buon lavoro!
-
RobotEyes
- Messaggi: 77
- Iscritto il: 20/04/2015, 18:39
- Occupazione: Condulente Informatico
- Home_Page: http://
- Prov.: TO
- Contatta:
Re: Come ti trasformo la 3Drag
@gigi78
Bellissimo lavoro,
Prenderò ispirazione da ciò che hai fatto
(inutile inventare ciò che è già stato fatto bene).
Una curiosità, a destra hai montato una webcam?
Lo scatolino a lato dell'elettronica è un display ?
Mi sembrano molti i connettori.
------------
@Prax
In teoria dovrebbero passare, vicine ma....
Appena le provo a montare scoprirò se vanno o no.
Vi farò sapere.
Ho tutto ciò che mi serve, meno il tempo --- sic !
Ciao
Bellissimo lavoro,
Prenderò ispirazione da ciò che hai fatto
(inutile inventare ciò che è già stato fatto bene).
Una curiosità, a destra hai montato una webcam?
Lo scatolino a lato dell'elettronica è un display ?
Mi sembrano molti i connettori.
------------
@Prax
In teoria dovrebbero passare, vicine ma....
Appena le provo a montare scoprirò se vanno o no.
Vi farò sapere.
Ho tutto ciò che mi serve, meno il tempo --- sic !
Ciao
Re: Come ti trasformo la 3Drag
Nello scatolino c'è un raspberry e la cam è collegata a quest'ultima.
Stampo con Optoprint.


Stampo con Optoprint.
-
RobotEyes
- Messaggi: 77
- Iscritto il: 20/04/2015, 18:39
- Occupazione: Condulente Informatico
- Home_Page: http://
- Prov.: TO
- Contatta:
Re: Come ti trasformo la 3Drag
@Prax
Per quanto riguarda le pulegge 16 denti troppo piccole:
Mi hai messo la pulce nell'orecchio e ho trovato una soluzione (se serve)
Invece di fare il tendicinghia lato cuscinetto che "spinge" (avvicinando ancora più i
due lati della cinghia) metto un'altra puleggia disassata che "tira" dal lato motore.
Ho già abbozzato il disegno, nel w.e. finisco.
Grazie della "pulce"
Carlo
Per quanto riguarda le pulegge 16 denti troppo piccole:
Mi hai messo la pulce nell'orecchio e ho trovato una soluzione (se serve)
Invece di fare il tendicinghia lato cuscinetto che "spinge" (avvicinando ancora più i
due lati della cinghia) metto un'altra puleggia disassata che "tira" dal lato motore.
Ho già abbozzato il disegno, nel w.e. finisco.
Grazie della "pulce"
Carlo
-
RobotEyes
- Messaggi: 77
- Iscritto il: 20/04/2015, 18:39
- Occupazione: Condulente Informatico
- Home_Page: http://
- Prov.: TO
- Contatta:
Re: Come ti trasformo la 3Drag
DRIVERS
Sono arrivati i drivers 8825 ...
Non ho resistito e li ho subito montati!!
Aggiustate le Vref (0.7V = 1.4A per X e Y; 0.9V = 1.8A Z; 0.8V=1.6A E)
Modificati i fattori di correzione su EEPROM (128.5/128.5/5120/1200)
inizio a provare Comandi manuali tutto OK, misure giuste etc.
Provo a stampare il mio parallelepipedo di test e......
Trrr Trrr Trrr il motore Z fà rumoracci! Blocco tutto e riverifico... Tutto OK.
Copio le prime righe del Gcode (Zero e movimenti Z) e provo a secco.
In effetti l'asse Z fà le bizze va a scatti!!!; però misuro ed è tutto OK
non c'è perdita passi.
Cambio il valore di accelerazione max asse Z da 100 a 25, riprovo:
Perfetto !
Il rumore mi piace "uuuuiiiiiiiiiiuuuu" Classica rampa di accelerezione e decelerazione.
(il limite è 25, a 30 torna ad impazzire)
Riprovo a stampare .....
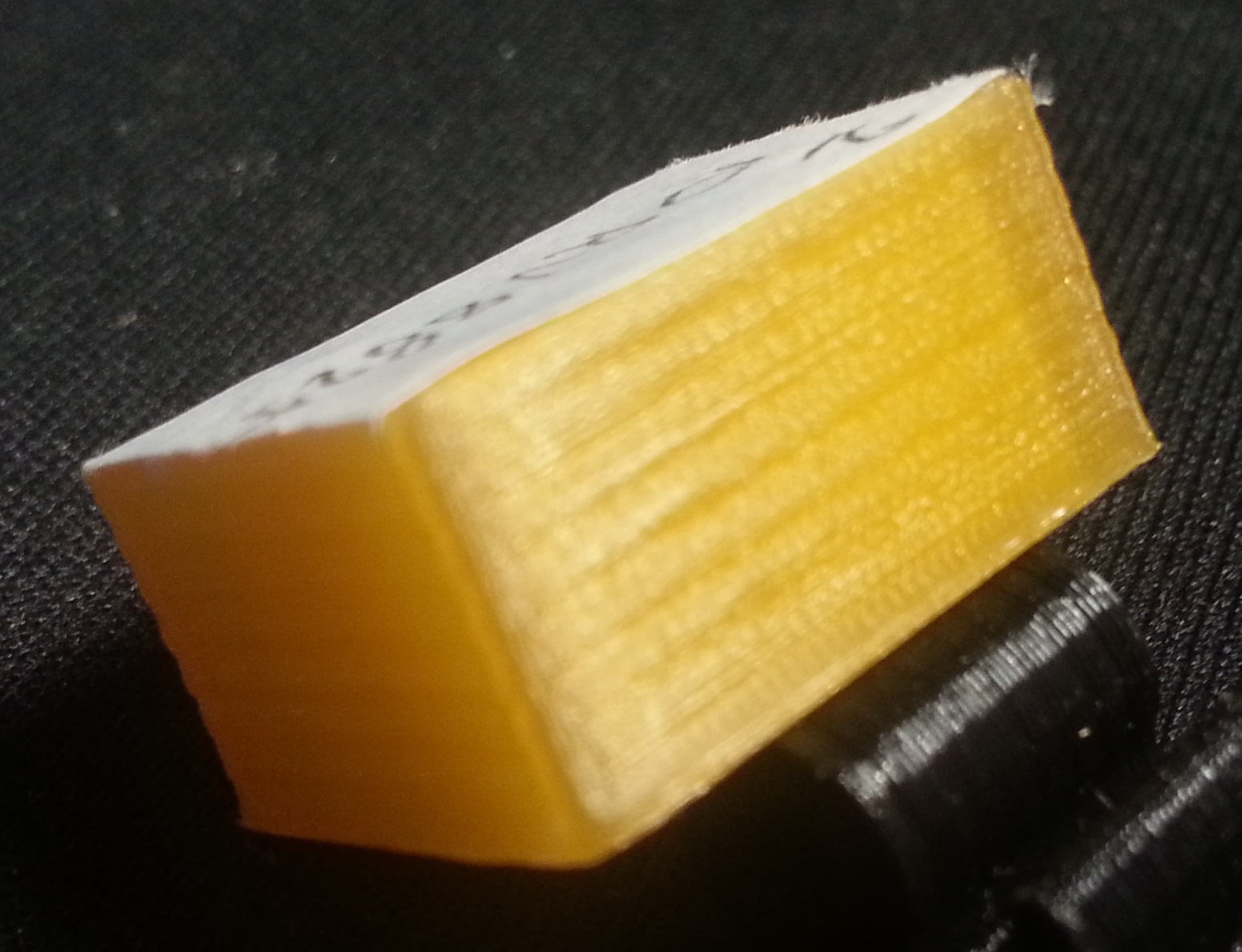
Bellissimo !
la zigrinatura è quasi sparita.
ecco le foto (col cellulare, appena posso le faccio con la macchina foto)
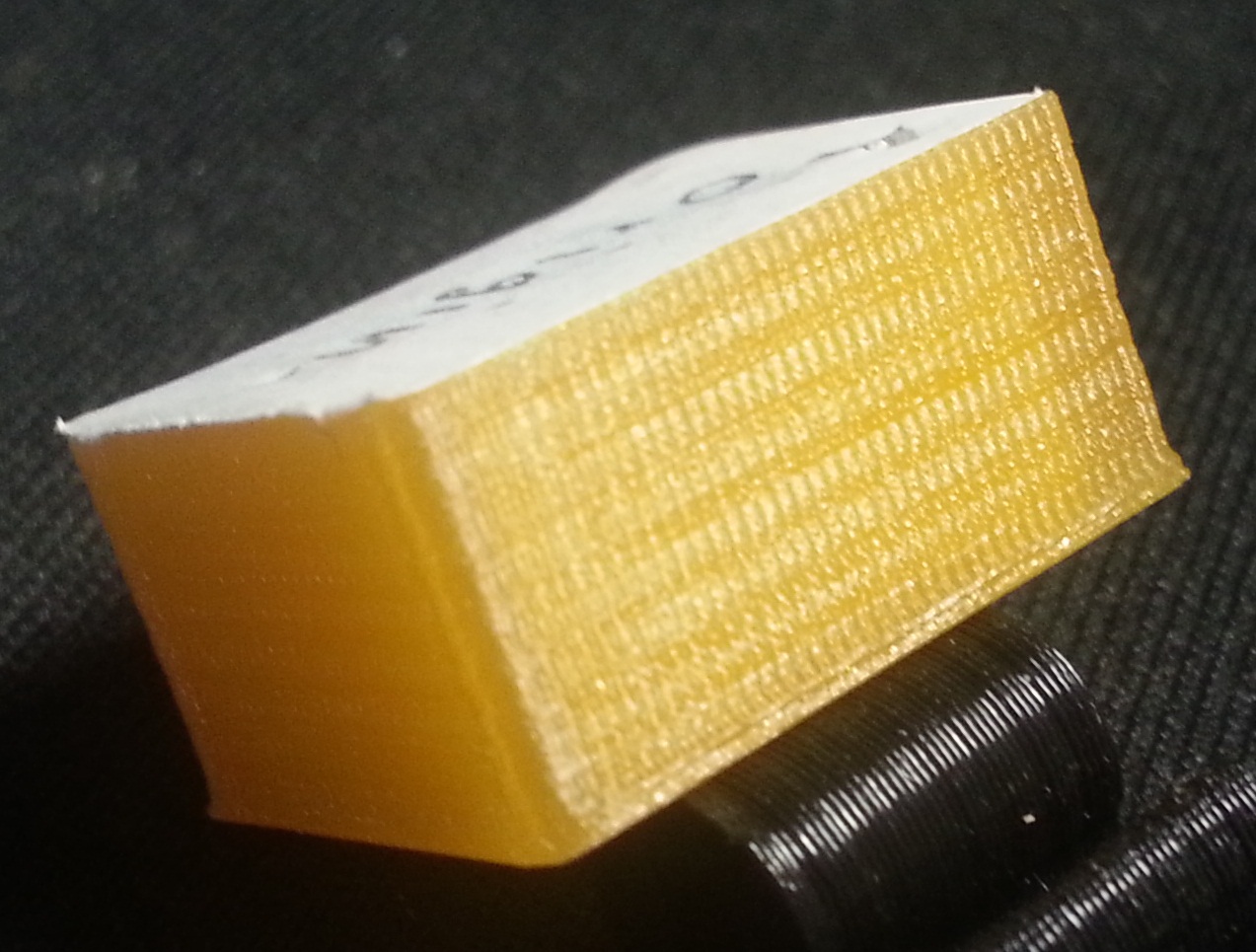
Prima :
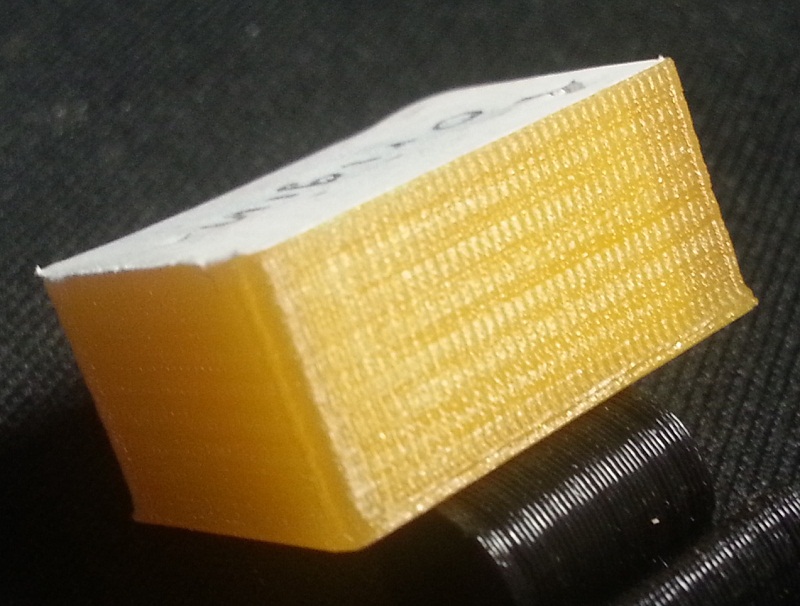
Dopo :
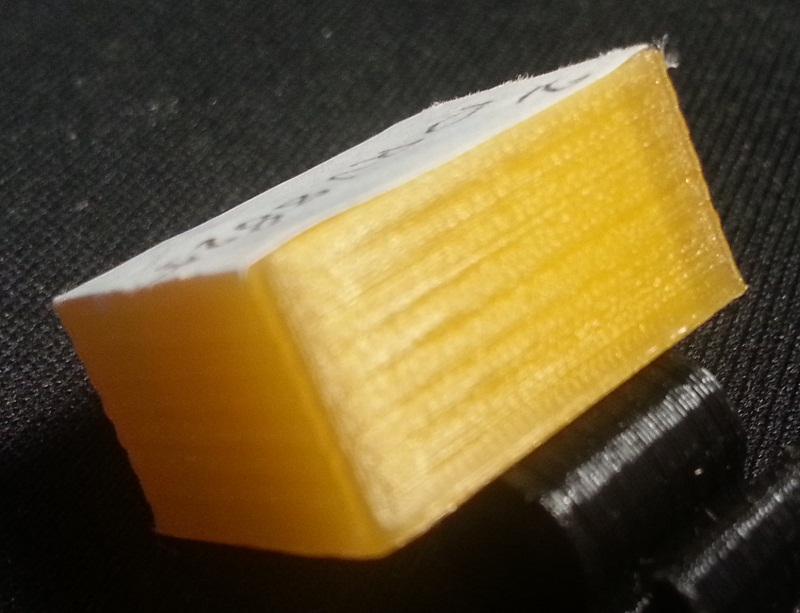
C'è ancora il wobbling, ma l'asse Z non l'ho ancora toccato.
la zigrinatura è quasi sparita, quando cambierò le cinghie mi aspetto la quasi perfezione.
Il parallelepipedo è 10x15x20mm
1° layer 0.125 - poi 0.0625 - nozzle 0.4
Credo che sia il limite fisico della stampante
A risentirci al prossimo punto !
Sono arrivati i drivers 8825 ...
Non ho resistito e li ho subito montati!!
Aggiustate le Vref (0.7V = 1.4A per X e Y; 0.9V = 1.8A Z; 0.8V=1.6A E)
Modificati i fattori di correzione su EEPROM (128.5/128.5/5120/1200)
inizio a provare Comandi manuali tutto OK, misure giuste etc.
Provo a stampare il mio parallelepipedo di test e......
Trrr Trrr Trrr il motore Z fà rumoracci! Blocco tutto e riverifico... Tutto OK.
Copio le prime righe del Gcode (Zero e movimenti Z) e provo a secco.
In effetti l'asse Z fà le bizze va a scatti!!!; però misuro ed è tutto OK
non c'è perdita passi.
Cambio il valore di accelerazione max asse Z da 100 a 25, riprovo:
Perfetto !
Il rumore mi piace "uuuuiiiiiiiiiiuuuu" Classica rampa di accelerezione e decelerazione.
(il limite è 25, a 30 torna ad impazzire)
Riprovo a stampare .....
Bellissimo !
la zigrinatura è quasi sparita.
ecco le foto (col cellulare, appena posso le faccio con la macchina foto)
Prima :
Dopo :
C'è ancora il wobbling, ma l'asse Z non l'ho ancora toccato.
la zigrinatura è quasi sparita, quando cambierò le cinghie mi aspetto la quasi perfezione.
Il parallelepipedo è 10x15x20mm
1° layer 0.125 - poi 0.0625 - nozzle 0.4
Credo che sia il limite fisico della stampante
A risentirci al prossimo punto !
-
RobotEyes
- Messaggi: 77
- Iscritto il: 20/04/2015, 18:39
- Occupazione: Condulente Informatico
- Home_Page: http://
- Prov.: TO
- Contatta:
Re: Come ti trasformo la 3Drag
Sempre sulle pulegge 16 denti
Questa è una bozza di come farò il tendicinghia / allargacinghia.
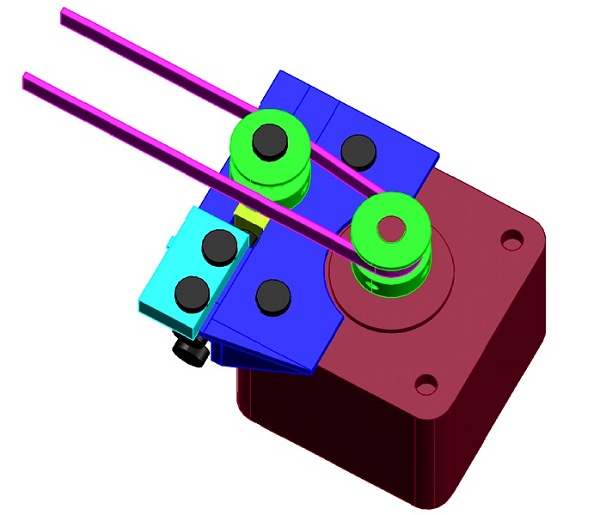
E' solo una bozza, c'è qualche particolare da migliorare, ma l'idea è questa !
Ciao
Questa è una bozza di come farò il tendicinghia / allargacinghia.
E' solo una bozza, c'è qualche particolare da migliorare, ma l'idea è questa !
Ciao
-
RobotEyes
- Messaggi: 77
- Iscritto il: 20/04/2015, 18:39
- Occupazione: Condulente Informatico
- Home_Page: http://
- Prov.: TO
- Contatta:
Re: Come ti trasformo la 3Drag
Allineamento del piatto
Leggendo qua e là mi ha illuminato un post sull'allineamento del piatto.
Non ricordo di chi fosse, ma devo dargli credito dell'idea.
Fin dalle prime lezioni di geometria solida, ci hanno insegnato che un
piano nello spazio è definito da tre punti !
Perchè le stampanti (non solo 3dRag) lo allineano su 4 ????
Onestamente non lo so, forse per maggiore stabilità??
Comunque:
visto che non era possibile inserire una vite centrale/frontale, nella struttura 3dRag
ho stampato un piccolo adattatore per avere l'alloggiamento della vite:
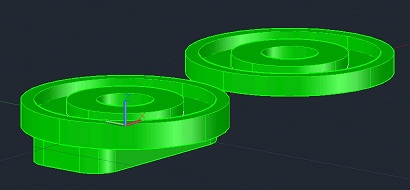
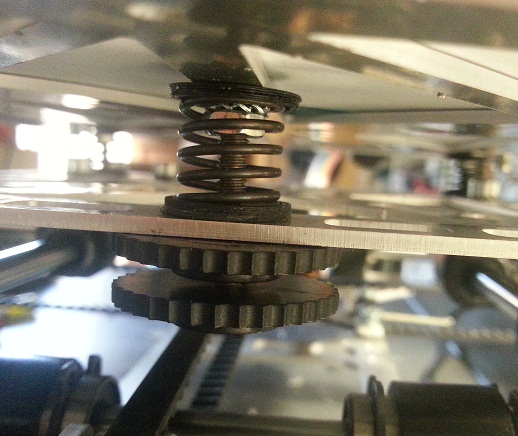
Inoltre ho aggiunto dei piattini per centrare le molle.
Avevo in casa della molla 10 x12x1 mm; ne ho tagliati 3 pezzi da 20 mm
che poi ho compresso a 13-15 mm
Segue la sequenza di montaggio:
L'adattatore
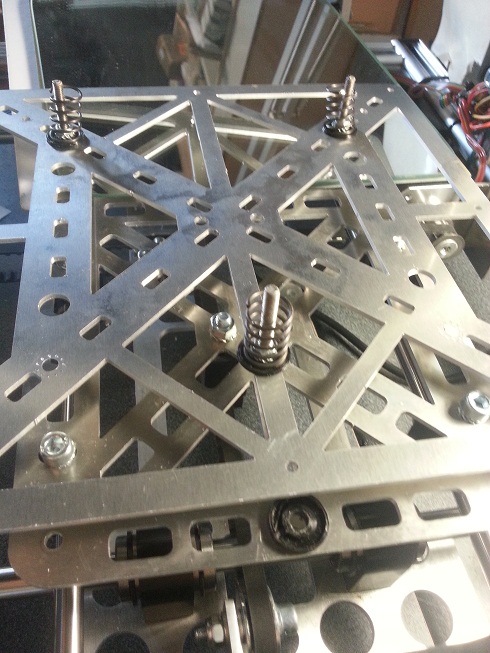
Il porta piatto con le molle (ho aggiunto dei centratori anche sopra ).
Il risultato finale.
Ora è sufficiente posizionare l'estrusore sopra le molle :e regolare le altezze...
io posiziono l'ugello a 0,1mm (Z) e regolo (con lo spessimetro) a 0,25/0,3 a freddo
oppure (meglio) a 0,1 con l'hot end caldo.
L'operazione si fa in 30 secondi, e non è necessario ripassare i punti e correggere.
Mi è venuto in mente di comprare un comparatore (cinese a 20 euro)
e fissarlo all'estrusore... vedremo.
NOTA:
Il controdado può creare problemi, chiudendolo cambia di 3-4 centesimi la regolazione.
In teoria non dovrebbe servire, perchè il carico della molla dovrebbe bastare...
ma ho comprato dei dadi M4 autobloccanti e li usarò eliminando i controdadi.
Per ora il risultato mi piace.
Vedremo con l'uso.
CIAO.
Leggendo qua e là mi ha illuminato un post sull'allineamento del piatto.
Non ricordo di chi fosse, ma devo dargli credito dell'idea.
Fin dalle prime lezioni di geometria solida, ci hanno insegnato che un
piano nello spazio è definito da tre punti !
Perchè le stampanti (non solo 3dRag) lo allineano su 4 ????
Onestamente non lo so, forse per maggiore stabilità??
Comunque:
visto che non era possibile inserire una vite centrale/frontale, nella struttura 3dRag
ho stampato un piccolo adattatore per avere l'alloggiamento della vite:
Inoltre ho aggiunto dei piattini per centrare le molle.
Avevo in casa della molla 10 x12x1 mm; ne ho tagliati 3 pezzi da 20 mm
che poi ho compresso a 13-15 mm
Segue la sequenza di montaggio:
L'adattatore
Il porta piatto con le molle (ho aggiunto dei centratori anche sopra ).
Il risultato finale.
Ora è sufficiente posizionare l'estrusore sopra le molle :
Codice: Seleziona tutto
G1 X100 Y35 Z0.1 F5000
G1 X35 Y165 Z0.1 F5000
G1 X165 Y165 Z0.1 F5000
io posiziono l'ugello a 0,1mm (Z) e regolo (con lo spessimetro) a 0,25/0,3 a freddo
oppure (meglio) a 0,1 con l'hot end caldo.
L'operazione si fa in 30 secondi, e non è necessario ripassare i punti e correggere.
Mi è venuto in mente di comprare un comparatore (cinese a 20 euro)
e fissarlo all'estrusore... vedremo.
NOTA:
Il controdado può creare problemi, chiudendolo cambia di 3-4 centesimi la regolazione.
In teoria non dovrebbe servire, perchè il carico della molla dovrebbe bastare...
ma ho comprato dei dadi M4 autobloccanti e li usarò eliminando i controdadi.
Per ora il risultato mi piace.
Vedremo con l'uso.
CIAO.