Come ti trasformo la 3Drag
Posted: 02/05/2015, 17:04
Ciao a tutti.
Dopo un periodo di test sulla mia nuova nuova 3Drag, e un milione di ore in compagnia di San Google
ho deciso di fare un cero numero di migliorie, per renderla più adeguata alle mie richieste.
In questo post inizio ad elencare le migliorie che intendo fare (o ho già fatto)
Seguiranno altri post con l'avanzamento lavori.
Attendo anche commenti e consigli da chiunque.
AGGIORNAMENTO - 12 agosto 2015
Dopo un po di prove e lavori ho deciso che, per quello che voglio io,
e cioè altissima precisione, la struttura della 3DRag è carente di principio.
Per cui ho deciso di costruirne una mia, vagamente ispirata alla Ultimaker 2
(pare sia la migliore sul mercato non pro),
Ovvero con movimenti X-Y in testa (magari CoreXY) e piatto discendente, volume 400x400x400.
e destinare gli ultimi acquisti (Viti trapezoidali, motori 400 passi etc)
alla nuova macchina,
di questa, però scriverò in un prossimo post, dopo aver abbozzato bene il progetto.
Sulla 3dRag voglio solo modificare almeno 1 asse (portarla a 200x400) ed usarla
per FilaFlex e cioccolato
Road Map:
1) Sostituzione finecorsa asse Z (Fatto)
L'attuale sistema è veramente inaffidabile.
Ho stampato questi oggetti http://www.thingiverse.com/thing:317411, poi ho sostituito la vite con una barretta
filettata M3 x 120mm, su cui ho avvitato un piccolo tallone ed una rotella godonata con marker ogni 0.0625 e 0.05 mm
http://www.robot-eyes.com/public/3Drag/1A.jpg
2) Srotolatori su cuscinetti con attacco rapido (Fatto)
anche questi trovati su Thngiverse, ma i coni da un progetto ed il fastlock da un'altro. Solo che non ho segnato i link
su richiesta posso condividere gli STL, ma non sono miei.
http://www.robot-eyes.com/public/3Drag/2A.jpg
3) Illuminazione con strip LED
4) Sostituzione cinghie assi X e Y con GT2 e pignone 16 denti.
Ho ordinato il materiale e lo sto aspettando.
Secondo la formula (step * passi) / (passo cinghia * denti) dovrei arrivare a 100 passi/mm (contro i 64)
Ho pensato anche alla possibilità di sostituire le cinghie con viti e chiocciole a ricircolo di sfere, ma......
anche comprandole professionalmente sono sempre centinaia di euro, più il lavoraccio di progettazione.
Lascio l'idea per quando progetterò la mia 3dCarlo.....
5) Sostituzione dei drivers A4988 con DRV8825 (Fatto)
Ho ordinato il materiale e lo sto aspettando.
usando step da 1/32 anzichè 1/16 raddopia la risoluzione (teorica)
Da quel che so degli stepper, però, un motore non si fermerà mai in frazione di passo superiore a 1/2
però la fluidità del movimento dovrebbe migliorare molto...
Prima : http://www.robot-eyes.com/public/3Drag/0A.jpg
Dopo : http://www.robot-eyes.com/public/3Drag/5A.jpg
6) Sostituzione piatto riscaldante:
Pensavo di utilizzare un cristallo 4/5 mm con un piatto MK2A incollato sotto .
Con l'occasione vorrei montare su molle il piatto, per evitare che un'errore in Z
mi distrugga il cristallo. (L'idea è molto simile a quella di Mikeb69)
Contemporaneamente sostituirò l'alimentatore 12V con uno da antifurto con batteria tampone.
Mentre il piatto sarà alimentato a 24V con un ripetitore MosFet (Non mi fido a usare quello sulla mainboard)
MK2A, ed alimentatori li ho, manca il cristallo ed i disaccoppiatori.
[Idea in secondo piano]
6A) Miglioramento allineamento piatto: (aggiunta 20/5/2015) (Fatto)
Strada facendo ho deciso di migliorare il sistema di allineamento del piatto, invece
di inserire solo le molle.
L'allineamento è ora fatto su tre punti.
Vedi descrizione nel post del 21/5
6b) Sostituzione Hot End(aggiunta 1/6/2015) (Fatto)
Dati i problemi dell'Hot End originale, l'ho sostituito con quello di IeC.
7a) Inscatolare tutta l'elettronica.
7b) Cambiare i cablaggi inguainandoli in cavo-catena e connettorare tutto
8) Miglioramento asse Z (Fatto)
Sostituzione della barra filettata M8 con altra estrusa in INOX e rettificata,
bloccaggio con cuscinetto anche in basso
In seguito verificherò l'opzione di passare alla barra TR10X2 o TR 8X1.5 (quasi introvabile) [Idea abbandonata]
9) sostituzione del motore Z con altro (sempre NEMA 17) da 0,9° o 400 passi.
In questo caso la risoluzione Z raddoppia davvero.
In seguito valuterò se sostituire anche gli altri.
(costano 25-30$ l'uno, e l'asse Z per ora è il mio tallone d'Achille)
[Idea abbandonata]
Opzioni future,,,,, Ancora nebulose.
10) Guida asse Z dai due lati.
Al momento penso di guidare l'asse di destra con cinghia e pulegge.
11) Camera (in lexan ?) con chiusura totale della macchina. [Idea abbandonata]
12) Doppio estrusore [Idea abbandonata]
Penso di sostituire la mainboard con Arduino mega (ne ho parecchie) e RAMPS
così non impazzisco in sdoppiatori di segnale etc
Gli hot end saranno Jhead (mi piacciono perché piccoli) o E3Dv6 (simili)
I drive..... ancora non so se tipo Wade (come l'attuale) o a vite (tipo IeC)
12) Estrusore di pasta (cioccolata, pasta di mandorle etc) per dolci Hi-Tec
------------------------------------------------------------------------------
Per ora chiudo lo sproloquio (ebbene sì, sono logorroico).
A presto con i risultati dei lavori.
Carlo.
Dopo un periodo di test sulla mia nuova nuova 3Drag, e un milione di ore in compagnia di San Google
ho deciso di fare un cero numero di migliorie, per renderla più adeguata alle mie richieste.
In questo post inizio ad elencare le migliorie che intendo fare (o ho già fatto)
Seguiranno altri post con l'avanzamento lavori.
Attendo anche commenti e consigli da chiunque.
AGGIORNAMENTO - 12 agosto 2015
Dopo un po di prove e lavori ho deciso che, per quello che voglio io,
e cioè altissima precisione, la struttura della 3DRag è carente di principio.
Per cui ho deciso di costruirne una mia, vagamente ispirata alla Ultimaker 2
(pare sia la migliore sul mercato non pro),
Ovvero con movimenti X-Y in testa (magari CoreXY) e piatto discendente, volume 400x400x400.
e destinare gli ultimi acquisti (Viti trapezoidali, motori 400 passi etc)
alla nuova macchina,
di questa, però scriverò in un prossimo post, dopo aver abbozzato bene il progetto.
Sulla 3dRag voglio solo modificare almeno 1 asse (portarla a 200x400) ed usarla
per FilaFlex e cioccolato
Road Map:
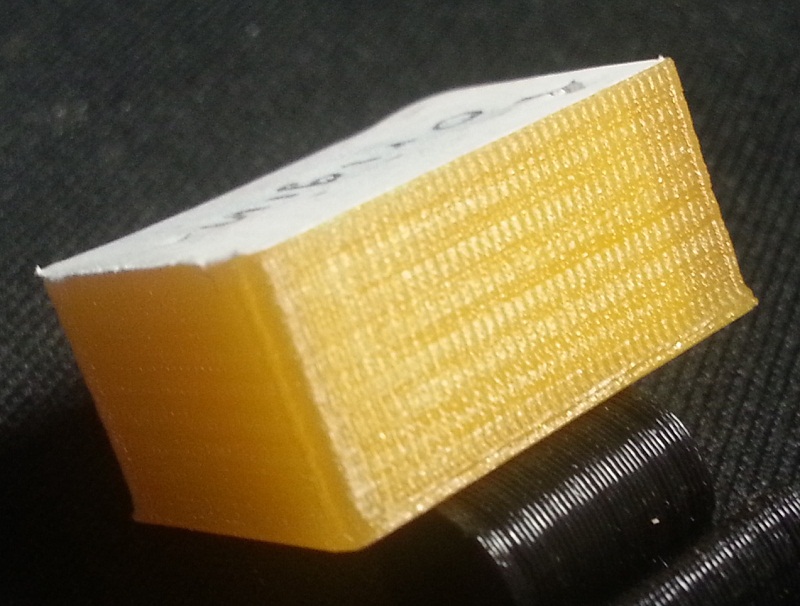
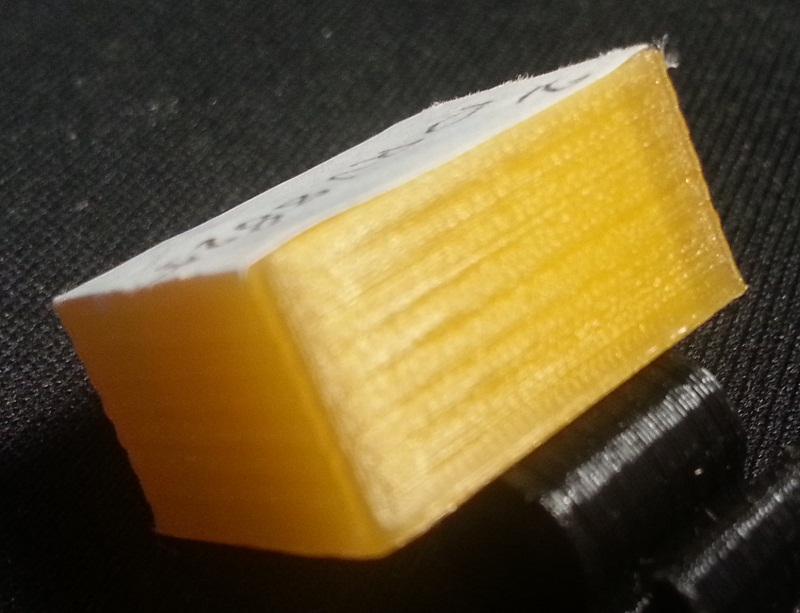
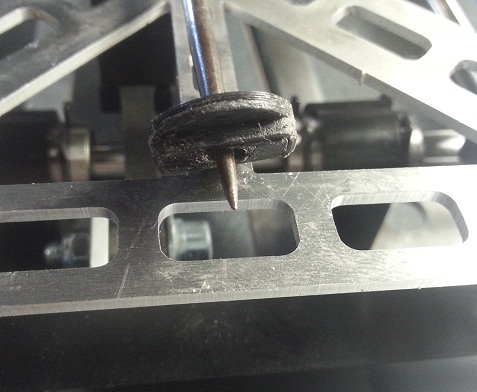
1) Sostituzione finecorsa asse Z (Fatto)
L'attuale sistema è veramente inaffidabile.
Ho stampato questi oggetti http://www.thingiverse.com/thing:317411, poi ho sostituito la vite con una barretta
filettata M3 x 120mm, su cui ho avvitato un piccolo tallone ed una rotella godonata con marker ogni 0.0625 e 0.05 mm
http://www.robot-eyes.com/public/3Drag/1A.jpg
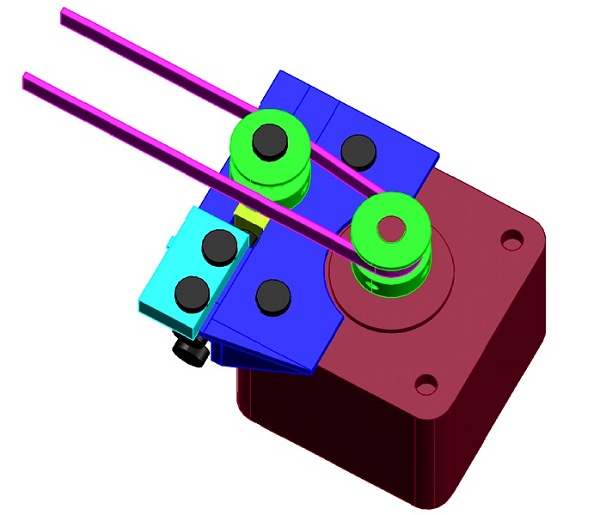
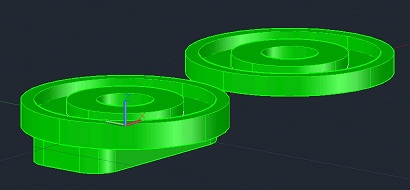
2) Srotolatori su cuscinetti con attacco rapido (Fatto)
anche questi trovati su Thngiverse, ma i coni da un progetto ed il fastlock da un'altro. Solo che non ho segnato i link
su richiesta posso condividere gli STL, ma non sono miei.
http://www.robot-eyes.com/public/3Drag/2A.jpg
3) Illuminazione con strip LED
4) Sostituzione cinghie assi X e Y con GT2 e pignone 16 denti.
Ho ordinato il materiale e lo sto aspettando.
Secondo la formula (step * passi) / (passo cinghia * denti) dovrei arrivare a 100 passi/mm (contro i 64)
Ho pensato anche alla possibilità di sostituire le cinghie con viti e chiocciole a ricircolo di sfere, ma......
anche comprandole professionalmente sono sempre centinaia di euro, più il lavoraccio di progettazione.
Lascio l'idea per quando progetterò la mia 3dCarlo.....
5) Sostituzione dei drivers A4988 con DRV8825 (Fatto)
Ho ordinato il materiale e lo sto aspettando.
usando step da 1/32 anzichè 1/16 raddopia la risoluzione (teorica)
Da quel che so degli stepper, però, un motore non si fermerà mai in frazione di passo superiore a 1/2
però la fluidità del movimento dovrebbe migliorare molto...
Prima : http://www.robot-eyes.com/public/3Drag/0A.jpg
Dopo : http://www.robot-eyes.com/public/3Drag/5A.jpg
6) Sostituzione piatto riscaldante:
Pensavo di utilizzare un cristallo 4/5 mm con un piatto MK2A incollato sotto .
Con l'occasione vorrei montare su molle il piatto, per evitare che un'errore in Z
mi distrugga il cristallo. (L'idea è molto simile a quella di Mikeb69)
Contemporaneamente sostituirò l'alimentatore 12V con uno da antifurto con batteria tampone.
Mentre il piatto sarà alimentato a 24V con un ripetitore MosFet (Non mi fido a usare quello sulla mainboard)
MK2A, ed alimentatori li ho, manca il cristallo ed i disaccoppiatori.
[Idea in secondo piano]
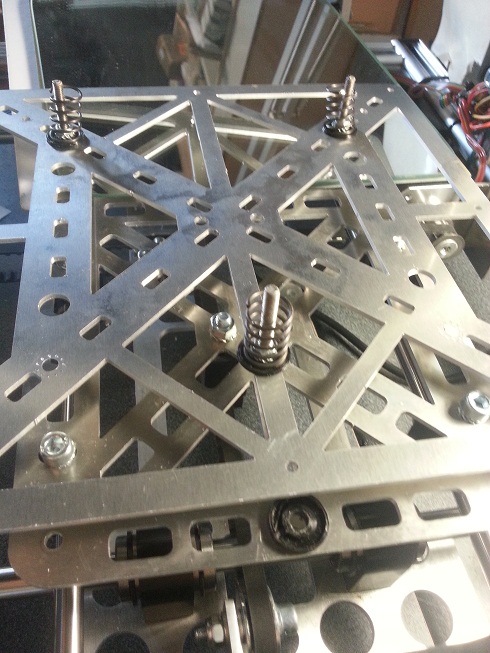
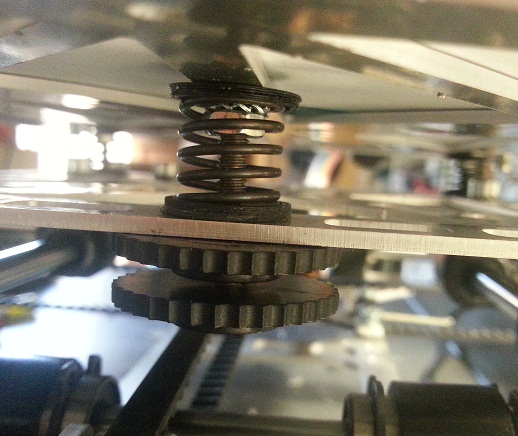
6A) Miglioramento allineamento piatto: (aggiunta 20/5/2015) (Fatto)
Strada facendo ho deciso di migliorare il sistema di allineamento del piatto, invece
di inserire solo le molle.
L'allineamento è ora fatto su tre punti.
Vedi descrizione nel post del 21/5
6b) Sostituzione Hot End(aggiunta 1/6/2015) (Fatto)
Dati i problemi dell'Hot End originale, l'ho sostituito con quello di IeC.
7a) Inscatolare tutta l'elettronica.
7b) Cambiare i cablaggi inguainandoli in cavo-catena e connettorare tutto
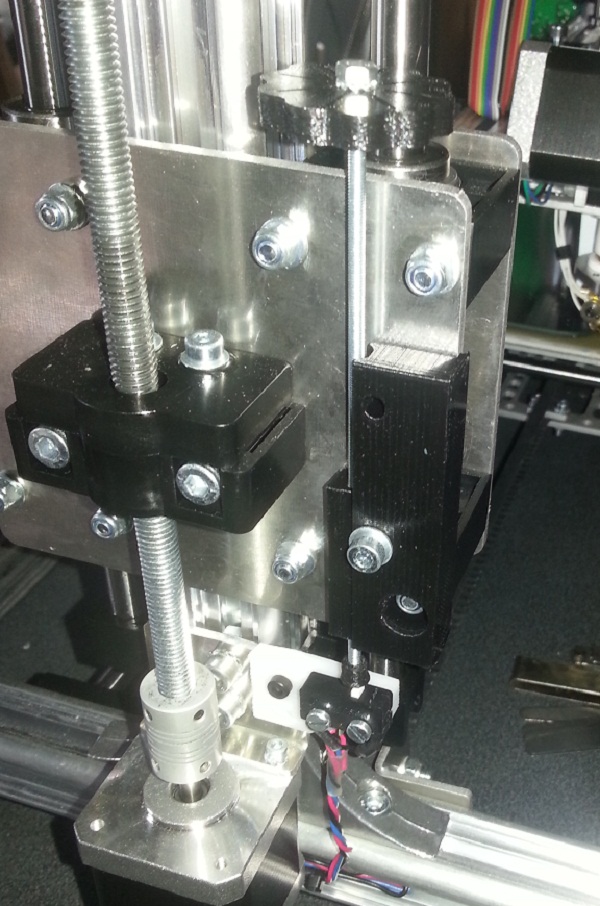
8) Miglioramento asse Z (Fatto)
Sostituzione della barra filettata M8 con altra estrusa in INOX e rettificata,
bloccaggio con cuscinetto anche in basso
In seguito verificherò l'opzione di passare alla barra TR10X2 o TR 8X1.5 (quasi introvabile) [Idea abbandonata]
9) sostituzione del motore Z con altro (sempre NEMA 17) da 0,9° o 400 passi.
In questo caso la risoluzione Z raddoppia davvero.
In seguito valuterò se sostituire anche gli altri.
(costano 25-30$ l'uno, e l'asse Z per ora è il mio tallone d'Achille)
[Idea abbandonata]
Opzioni future,,,,, Ancora nebulose.
10) Guida asse Z dai due lati.
Al momento penso di guidare l'asse di destra con cinghia e pulegge.
11) Camera (in lexan ?) con chiusura totale della macchina. [Idea abbandonata]
12) Doppio estrusore [Idea abbandonata]
Penso di sostituire la mainboard con Arduino mega (ne ho parecchie) e RAMPS
così non impazzisco in sdoppiatori di segnale etc
Gli hot end saranno Jhead (mi piacciono perché piccoli) o E3Dv6 (simili)
I drive..... ancora non so se tipo Wade (come l'attuale) o a vite (tipo IeC)
12) Estrusore di pasta (cioccolata, pasta di mandorle etc) per dolci Hi-Tec
------------------------------------------------------------------------------
Per ora chiudo lo sproloquio (ebbene sì, sono logorroico).
A presto con i risultati dei lavori.
Carlo.
{kind=link}
{kind=link}
{kind=link}
{kind=link}